|
Seafox Retrofit Navigation
|
|
|
 |
|
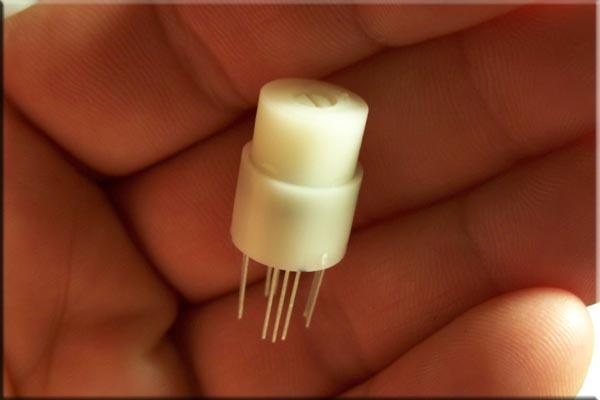
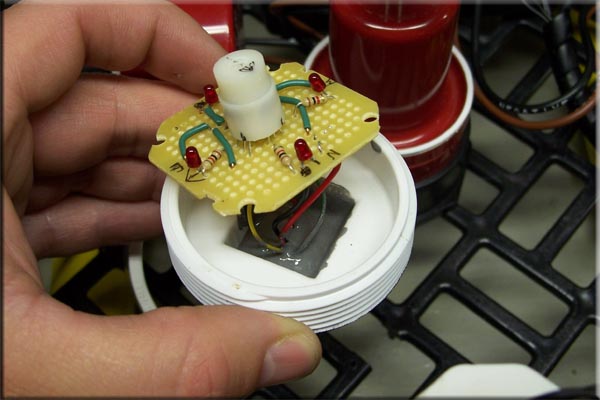
The heart of the Seafox Navigation system is this Dinsmore 1490 Digital Compass Sensor, this sensor provides eight directions of heading information by measuring the earths magnetic field using hall-effect technology.
|
|
|
 |
|
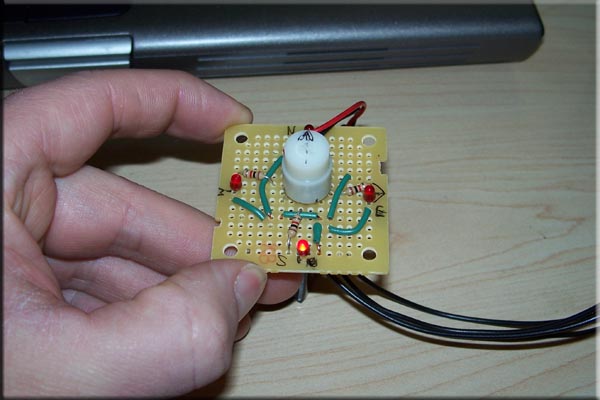
The Compass Sensor is mounted to a simple circuit board along with a few resistors and LED's. Four wires connect to the output legs of the Sensor, run through the Tether, and then hook to the Phidgets Board.
|
|
|
 |
|
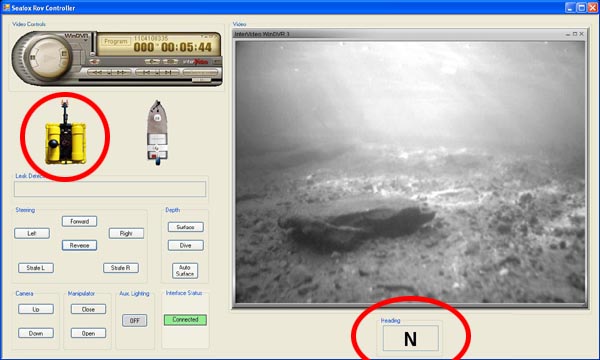
The Sensors Outputs put out a voltage that is read by 4 Inputs on the Phidgets Card and is interrupted by my program and displayed on screen as N-NE-E-SE-S-SW-W-NW as well as an images that represent the direction of the Rov. (Circled in red)
I have one Compass on the Rov and one on my Boat this helps me determine where the Rov is in relation to the Boat. |
|
|
 |
|
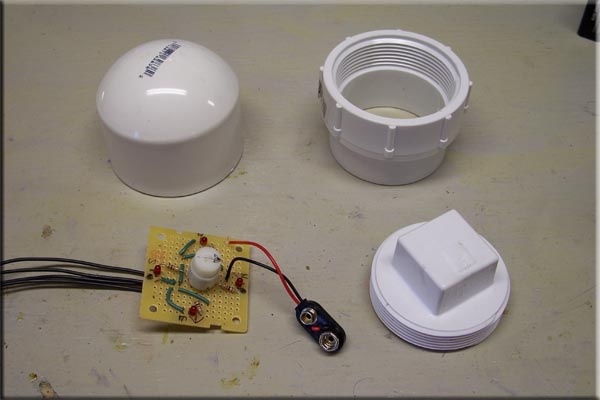
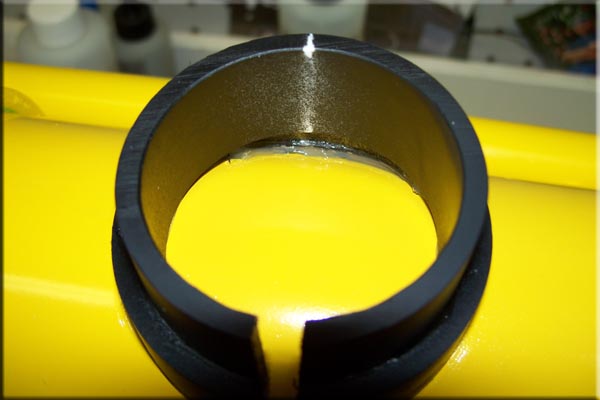
The Housing for the Compass was made from a few 2" PVC fittings.
|
|
|
 |
|
I turned the pieces down a bit on the lathe just so the housing was a bit smaller.
|
|
|
 |
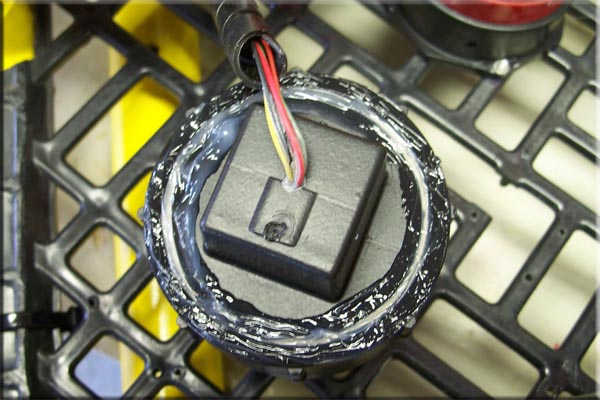
| The Compass will be attached to the plug and the Housing will be screwed onto the top of it. Here the wires have been fed through the plug and I filled the bottom of the plug with JB Weld to seal up the wire exit holes. |
|
|
 |
|
Next using a little CA I glued the Compass board right to the plug.
|
|
|
 |
| After a quick paint job I wrapping the plugs threads with Teflon Tape and screwing on the Housing. I also decided to put a little silicone around the plug just for added protection. |
|
|
 |
| The mount for the Compass housing was also made from PVC Pipe and left over pieces I trimmed off before. The only place I could find to mount the Compass without getting interference from the motors was on top of one of the Buoyancy Pods (see the Construction Page for more on that problem) |
|
|
 |
|
The Mount was secured to the Buoyancy Pod with a little silicone.
|
|
|
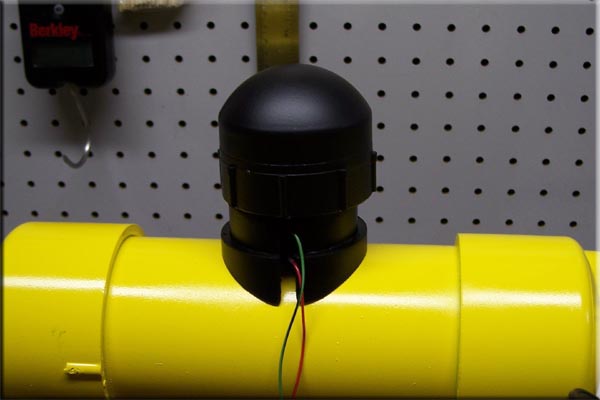 |
| The Compass Housing was also attached to the Mount with silicone. I figured it might cut down on any vibration from the thrusters. |
|
|
 |
|
Here is the Final Mounted Compass Housing awaiting final wiring.
|
|
|
 |
| All Information, Pictures, and Material is copyright © 1998-2009 by Stephen Thone and may not be used for any personal or commercial purposes without the consent of the author. All rights reserved. The Author makes no guarantees or warranties as to the accuracy or completeness of, or results to be obtained from accessing and using the Information herein. | |||