|
Manipulator
|
|
|
 |
|
|
 |
|
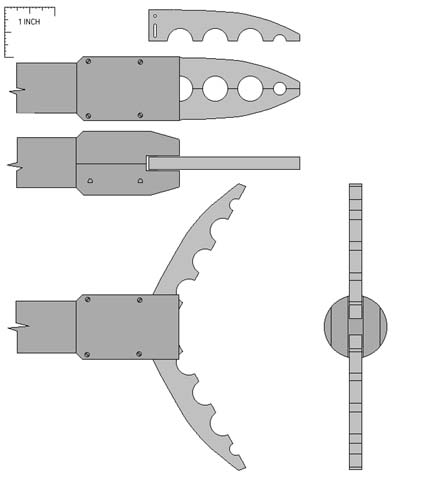
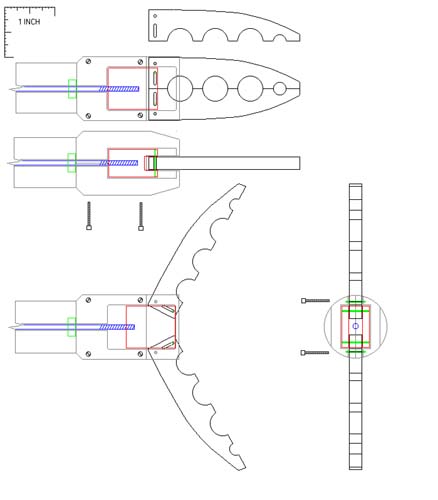
These are the Plans for the New Manipulator, below is a little of what went into making them.
|
|
|
 |
|
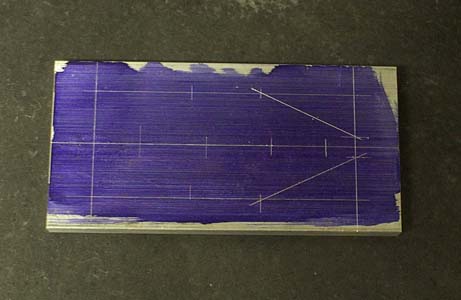
I started the fingers by laying out the design on a 2" x 4" x 1/4" piece of 6061 Aluminum.
|
|
|
 |
|
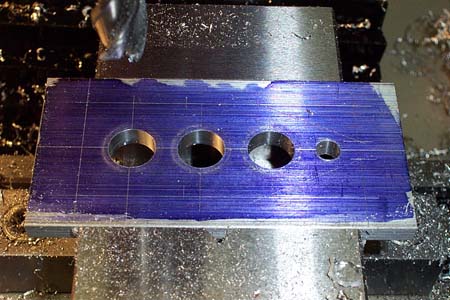
Next I drilled out the holes which will be the gripper of the fingers on the Mill.
|
|
|
 |
|
Then I cut that in half and shaped the tip of the fingers.
|
|
|
 |
|
Another View
|
|
|
 |
|
The completed Fingers and Actuator.
|
|
|
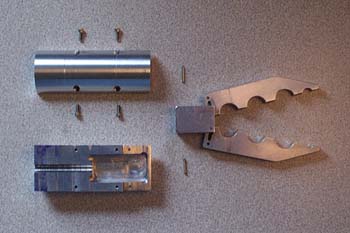 |
| When I drew up the plans for this manipulator it seamed like it would be a pretty simple build. You probably can't tell from just looking at the parts unless you know anything about machining, but a lot of work goes into these simple pieces more than I guessed at the start. I now know why commercial Rov parts cost so much. |
|
|
 |
|
Test fit with the fingers closed.
|
|
|
 |
|
Fingers in the fully open position.
|
|
|
 |
|
It's starting to take shape. I still have a ways to go though.
It will only have one motor driving the fingers to open and close but the way I designed it I should be able to rotate the fingers 360 Degrees. In theory when the fingers are fully opened the whole wrist assembly will then rotate in one direction, then when they are fully closed it will rotate the other direction, I haven't actually tested that function out yet and it may cause problems while trying to pick up items. |
|
|
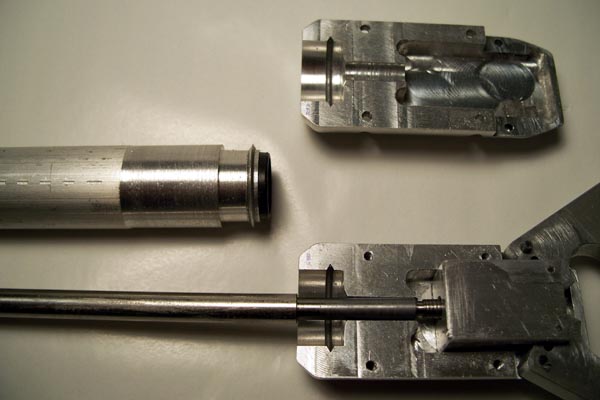 |
| This is an updated picture of how the wrist section mounts. The two halves mount on the arm and the V groove holds the wrist section on the arm while still allowing it to rotate. If the rotation is a problem a simple screw could hold the wrist in a fixed position which would still allow it to be rotated manually depending on the situation. That may not be very practical in a real world dive but I haven't finished the arm so another motor could still be added at the base to rotate the entire arm if need be. |
|
|
 |
|
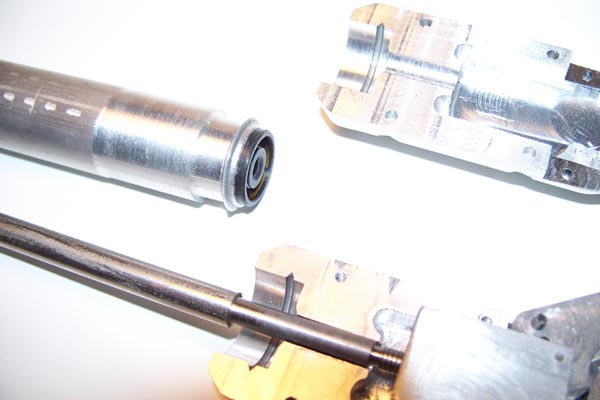
This is just another quick picture to show the shaft seal for the Actuator rod.
|
|
|
 |
| All Information, Pictures, and Material is copyright © 1998-2009 by Stephen Thone and may not be used for any personal or commercial purposes without the consent of the author. All rights reserved. The Author makes no guarantees or warranties as to the accuracy or completeness of, or results to be obtained from accessing and using the Information herein. | |||